Use cases
Transformation parameters for Nordic and Baltic ETRS89 realisations
Within the Nordic Geodetic Commision Nordic and Baltic countries collaborate on producing geodetic transformations between ITRS and ETRS89. The collaboration focuses on producing transformations that account for the significant GIA signal observed across the region. The transformations are collectively known as the "NKG Transformations" and so far they exist in two versions. The first is based on a GPS campaign from 2008 (Häkli et al, 2016) and the second presents an update based on data from 2020 (Häkli et al, 2023). In the following it is demonstrated how to recreate the results of the NKG2020 transformations using Transformo.
The NKG transformation method consists of several transformation steps. The first part creates a path between ITRS and a hub reference frame called NKG_ETRF14. The second part connects the NKG_ETRF14 and the individual nation realisations of ETRS89. Transformation parameters are only derived for the latter part. Here the method is demonstrated for Denmark but the principle is shared between all seven countries involved.
---
config:
look: handDrawn
theme: base
themeVariables:
fontFamily: monospace
fontSize: 16px
---
flowchart
subgraph NKG2020 Method
direction TB
S2["ITRF2014@2015.0"] -->|"<i>P<sub>EUREF</sub></i>"| S3["ETRF2014@2015.0"]
S3 -->|"<i>V<sub>NKG_RF17vel</sub></i>"| S4["ETRF2014(2000.0)"]
S4 -->|"<i>V<sub>NKG_RF17vel</sub></i>"| S6["ETRF2014(2015.829)"]
S6 -- "<b>7 Parameter Helmert</b>" --> S7["ETRS89-DNK"]
S7
end
subgraph Transformo Components
direction TB
A2["Source DataSource"] -->|"<i>ProjOperator(helmert)</i>"| A3["Intermediate result 1"]
A3 -->|"<i>ProjOperator(deformation)</i>"| A4["Intermediate result 2"]
A4 -->|"<i>ProjOperator(deformation)</i>"| A6["Intermediate result 3"]
A6 -- "<b>Helmert7Param</b>" --> A7["Target DataSource"]
A7
endThe schematics of Figure 1 is expressed as a Transformo pipeline below. Note the pre-processing command, that ensure that PROJ has access to the NKG deformation model. The source and target data is supplied in CSV-files with only station names and coordinates available, so in both cases an epoch and uncertainties are supplied. The uncertainties are set to 0 in this case, meaning that these are defining coordinates with no uncertainty. This equals the approach used for the NKG2020 transformations. The ITRF2014-coordinates are not defining the frame though, so a fairer approach would be to include uncertainty estimates for those.
pre_processing_commands:
- projsync --file eur_nkg
source_data:
- name: ITRF2014@2015.0
type: csv
filename: ITRF2014_DK.csv
columns: [station, x, y, z]
t: 2015.0
sx: 0
sy: 0
sz: 0
target_data:
- name: ETRS89-DNK
type: csv
filename: ETRS89_DK.csv
columns: [station, x, y, z]
t: 2015.829
sx: 0
sy: 0
sz: 0
operators:
- name: ITRF2014@2015.0 to ETRF2014@2015.0
type: proj_operator
proj_string: +proj=helmert
+rx=0.001785 +ry=0.011151 +rz=-0.01617 +s=0
+drx=8.5e-05 +dry=0.000531 +drz=-0.00077 +ds=0
+t_epoch=2010 +convention=position_vector
- name: ETRF2014@2015.0 to ETRF2014@2000.0 (NKG_ETRF14)
type: proj_operator
proj_string: +proj=deformation
+grids=eur_nkg_nkgrf17vel.tif
+t_epoch=2000 +ellps=GRS80 +inv
- name: ETRF92@2000.0 to ETRS89-DNK
type: proj_operator
proj_string: +proj=deformation
+grids=eur_nkg_nkgrf17vel.tif
+dt=15.829 +ellps=GRS80
- name: NKG_ETRF14@2000.0 to ETRF92@2000.0
type: helmert_7param
convention: position_vector
small_angle_approximation: false
presenters:
- type: topocentricresidual_presenter
name: ENU Residuals
coordinate_type: cartesian
- type: proj_presenter
name: PROJ String
The pipeline is processed by running
The results are presented below and compared to source of truth in Häkli et al (2023).
Results
Output of the Presenters in a slightly modified form.
Station coordinate residuals
Residuals in topocentric space of the modelled coordinates as compared to target cooordinates. The table contains coordinate differences of the individual coordinate components as well as the norm of the residual vector, both in the plane and across all dimensions.
| Station | East | North | Up | Planar residual | Total residual |
|---|---|---|---|---|---|
| BUDP | -0.159 | -0.0631 | 0.571 | 0.171 | 0.596 |
| ESBC | 0.328 | 0.277 | -0.527 | 0.429 | 0.679 |
| FER5 | -0.0516 | -0.39 | 2.73 | 0.394 | 2.75 |
| FYHA | 0.916 | 0.0012 | 0.996 | 0.916 | 1.35 |
| GESR | -0.361 | 0.085 | -1.37 | 0.371 | 1.42 |
| HABY | 0.417 | -0.264 | -4.08 | 0.494 | 4.11 |
| HIRS | -0.642 | -0.145 | -0.629 | 0.659 | 0.91 |
| SMID | -0.467 | 1.05 | 0.0992 | 1.15 | 1.15 |
| SULD | -0.303 | 0.0332 | -0.052 | 0.305 | 0.309 |
| TEJH | 0.273 | -0.598 | 2.27 | 0.658 | 2.37 |
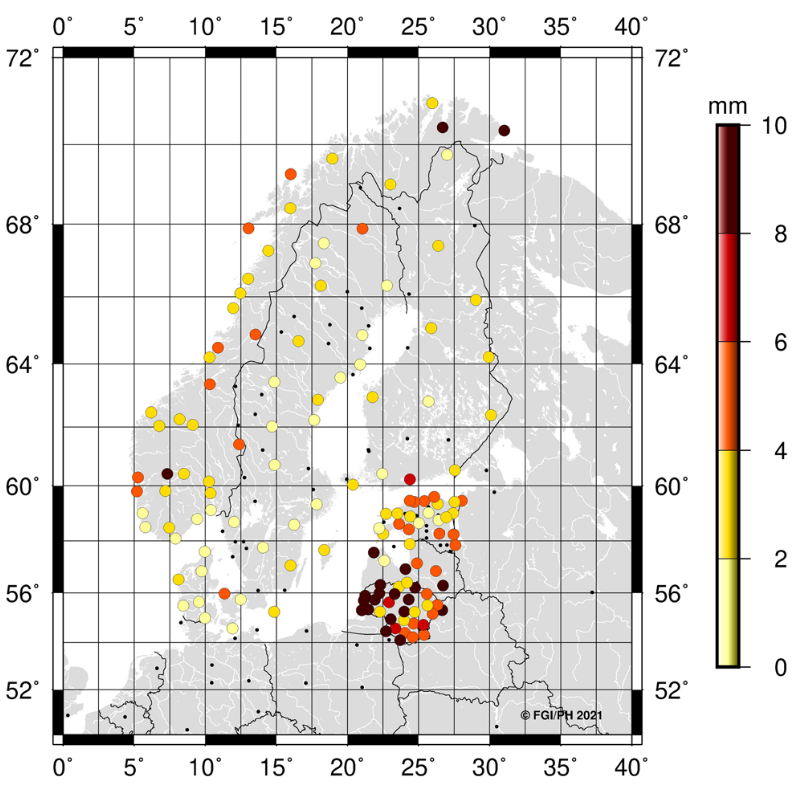
The paper doesn't include a similar table but Figure 3 presents the 3D residuals in a visual form. By comparing the figure with the data in the table we see that the two stations with higher residuals (FER5, HABY) correspond to the two Danish stations with residuals in the 2-4 mm and 4-6 mm brackets:
Residual statistics
Looking at the statistics of the residual we get the data below from Transformo
| Measure | East | North | Up | Planar residual | Total residual |
|---|---|---|---|---|---|
| avg | -0.00489 | -0.00122 | -2.75e-06 | 0.555 | 1.57 |
| std | 0.456 | 0.424 | 1.82 | 0.282 | 1.57 |
which is closely aligned with the statistics in Table 2 of Häkli et al (2023):
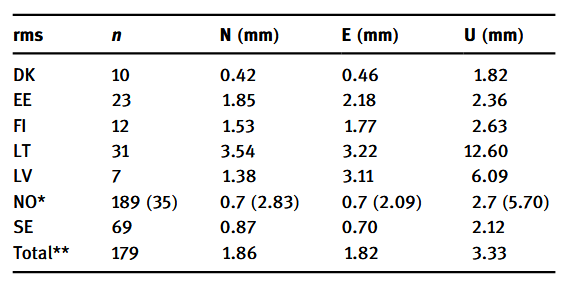
where the standard deviation (RMS) of the east, north and up components are the same.
Helmert Parameters
Transformo returns the estimated Helmert parameters as a PROJ string. We get the PROJ string for the entire transformation including all steps between ITRS and ETRS89:
+proj=pipeline
+step +proj=helmert +proj=helmert +rx=0.001785 +ry=0.011151 +rz=-0.01617 +s=0 +drx=8.5e-05 +dry=0.000531 +drz=-0.00077 +ds=0 +t_epoch=2010 +convention=position_vector
+step +proj=deformation +proj=deformation +grids=eur_nkg_nkgrf17vel.tif +t_epoch=2000 +ellps=GRS80 +inv
+step +proj=deformation +proj=deformation +grids=eur_nkg_nkgrf17vel.tif +dt=15.829 +ellps=GRS80
+step +proj=helmert +x=0.66818 +y=0.04453 +z=-0.45049 +rx=0.00312873 +ry=-0.02373416 +rz=0.00442974 +s=-0.003136 +convention=position_vector
Isolating the relevant Helmert step we get
| x [m] | y [m] | z [m] | s [ppm] | rx [arc sec] | ry [arc sec] | rz [arc sec] |
|---|---|---|---|---|---|---|
| 0.66818 | 0.04453 | -0.45049 | -0.003136 | 0.00312873 | -0.02373416 | 0.00442974 |
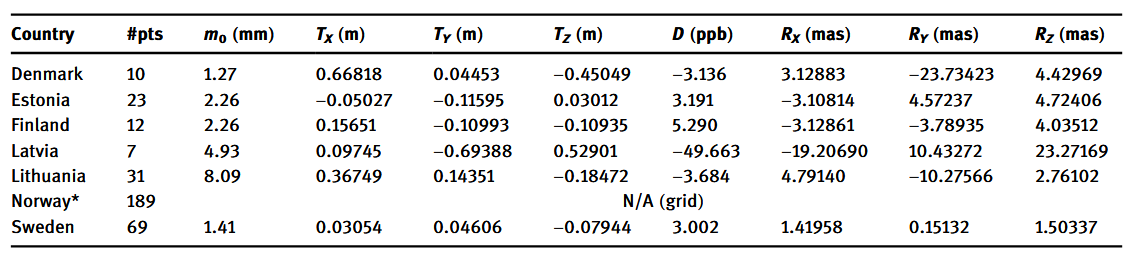
Comparing to Table 3 (Häkli et al, 2023) we see that the translation and scale parameters are exactly the same and that slight variations are observed in the rotation parameters. The differences are at the level of 10-6 arcseconds and can be regarded as negligable.
Conclusion
Transformo recreates the results in the NKG2020 transformations paper almost exactly. Negligable differences in the rotation parameters of the Helmert transformations are found which can likely be attributed to different convergence criteria in the iterative solution.
Overall Transformo is able to produce reliable results on par with existing code.
References
-
Häkli, P., Lidberg, M., Jivall, L., Nørbech, T., Tangen, O., Weber, M., Pihlak, P., Aleksejenko, I. and Paršeliunas, E. (2016),, The NKG2008 GPS campaign – final transformation results and a new common Nordic reference frame. Journal of Geodetic Science, Vol. 6 (Issue 1).
-
Häkli, P., Evers, K., Jivall, L., Nilsson, T., Himle, S., Kollo, K., Liepiņš, I., Paršeliūnas, E., Vestøl, O. and Lidberg, M. (2023), NKG2020 transformation: An updated transformation between dynamic and static reference frames in the Nordic and Baltic countries. Journal of Geodetic Science, Vol. 13 (Issue 1)